A couple thousand miles ago I started to notice my smart felt a little floaty on rough surfaces, most notably gravel. More so than before, that is... this just brought it to my attention. Tire pressures were the same 36R/44F I've been using for some time. My first thoughts for what had changed were that either a shock had died or I'd picked up a bit of outward toe somewhere. Checked the shocks by jumping on the bumpers... none were quite as good as they used to be, but all seemed plenty good enough. Checked for toe out as well as I could in my driveway, but due to not having an alignment machine I couldn't find anything but a gross error... which I didn't find.
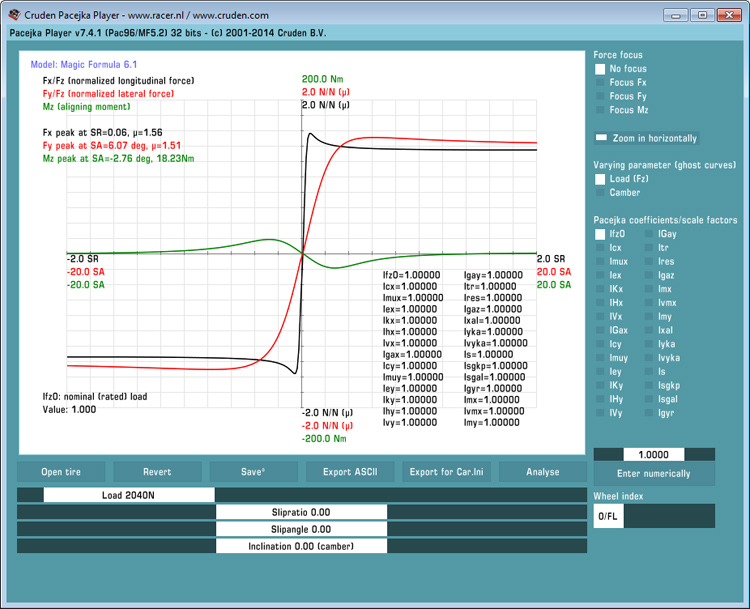
A few days after those checks, I figured out it wasn't anything to do with the slip ratio vs. grip curve like I thought it was, it was just an oversteer bias. The car still feels plenty understeery on pavement, but when I hit fine-scale bumps it goes a bit oversteery where it had been merely neutral before. My best explanation for the difference is that the rear de-dion tube suspension has a lot more unsprung weight than the front McPherson strut suspension. The engineers presumably just tuned the spring / damping / sway bar rates to keep it from being oversteery in any situation, resulting in a big understeer bias in most situations.
As for what changed about my car, I found that my rear tires have worn far too much for their miles... and the pattern is as if they're underinflated, which is odd since they're stock sizes and have been run at the factory pressure recommendation since I got them installed. My front tires have dead even (and much less) wear, and I've been running them at 44 lbs (sidewall rating). Looks like I'll have to crank up the rear pressure a bit, which will lose me my directional stability I got by using those crazy pressures. Anyway, I expect the wear lost me a bit of grip in back, leading to a bit more of an oversteer bias overall that I just can't feel on pavement because it's so far from neutral to start with.
Anyway, I expect the wear lost me a bit of grip in back, leading to a bit more of an oversteer bias overall that I just can't feel on pavement because it's so far from neutral to start with.
A few days after those checks, I figured out it wasn't anything to do with the slip ratio vs. grip curve like I thought it was, it was just an oversteer bias. The car still feels plenty understeery on pavement, but when I hit fine-scale bumps it goes a bit oversteery where it had been merely neutral before. My best explanation for the difference is that the rear de-dion tube suspension has a lot more unsprung weight than the front McPherson strut suspension. The engineers presumably just tuned the spring / damping / sway bar rates to keep it from being oversteery in any situation, resulting in a big understeer bias in most situations.
As for what changed about my car, I found that my rear tires have worn far too much for their miles... and the pattern is as if they're underinflated, which is odd since they're stock sizes and have been run at the factory pressure recommendation since I got them installed. My front tires have dead even (and much less) wear, and I've been running them at 44 lbs (sidewall rating). Looks like I'll have to crank up the rear pressure a bit, which will lose me my directional stability I got by using those crazy pressures.
Anyway, I expect the wear lost me a bit of grip in back, leading to a bit more of an oversteer bias overall that I just can't feel on pavement because it's so far from neutral to start with.